

X3E伺服報警(jǐng)分析及處理方法
文章出處:本(běn)站 人氣:12883 發表時間:2022-02-06 12:30:14
|
報警代碼(mǎ)和名(míng)稱 |
原(yuán)因 |
處(chù)理措(cuò)施 |
|
Err.001: 係統參數異常 |
1、控製電源電壓瞬時下(xià)降; 2、升級驅動器軟件之後,部分參數的範圍有改動,導致之前(qián)存儲的參數超出上下限; |
1、確(què)保電源電壓在規格範圍內,恢複出廠參數(P20.06設置為1); 2、如(rú)果升級了軟件,請先恢複出廠參數; |
|
Err.002: 產品型號選擇故障 |
1、編碼器(qì)連接線損壞或(huò)連接鬆動; 2、無效的(de)電機型號或驅動器型號(hào); |
1、檢查編碼器接線是(shì)否正常,確(què)保接線牢固; 2、更換成有效(xiào)的電機型號或驅動(dòng)器型號,型號附表2; |
|
Err.003: 參數存儲中故障(zhàng) |
1、參數讀寫過(guò)於頻繁; 2、參數存儲設備故障; 3、控(kòng)製電源不穩定; 4、驅動器(qì)故障; |
1 上位裝置用通信修改參數並寫入EEPROM操作過於頻繁。請檢查通信程序是否存在(zài)頻繁(fán)修改參數並寫入EEPROM的指令; 2 檢查控製電接線,同時確保控製電源電壓在規格範圍內(nèi); |
|
Err.004: FPGA故障 |
軟件版本異(yì)常(cháng) |
查看軟件版本號是否(fǒu)正常 (查看P21.36,P21.37,P21.38是否存在為0000的情況,如有則需要升級固(gù)件;升級後異常未消除,請谘詢廠商技術;)
|
|
Err.005: 產品匹配故障 |
1、編碼器連接線損壞或連接鬆動; 2、使用不支持的外(wài)部接口如編碼器等; 3、電機型號與驅動器型號功率不匹配; 4、不(bú)存在的產品(pǐn)型號編碼 |
1、檢查編(biān)碼器接線是否良好; 2、更換不匹配的(de)產品,檢查伺(sì)服參數P18.00,P19.01(需要先把19.00設(shè)為2再查看P19.01);具體產品對應型號詳見附表一、附表二; 3、選擇(zé)正確的(de)編碼器類型或更換其他(tā)類型的驅動器;例如設置的電(diàn)機(jī)型號的功率等級大於驅動器的功率等級(jí),或者設置的電機型號的功率(lǜ)等級比驅(qū)動器的功率等級差了兩級以上會報出這個故障; 4、使用非標電機時,請參照非標電機(jī)具體設定(dìng)或谘詢廠商技術; |
|
Err.006: 程序異常 |
1、係(xì)統參數異常; 2、驅動器內部故障; |
EEPROM故障,恢複出廠參(cān)數(P20.06設置(zhì)為1,重新上(shàng)電); |
|
Err.007: 增量編碼器UVW數據異常 |
1、上電時檢測到編碼器信號異常; 2、驅(qū)動器版本號(hào)異常; |
1、檢查確認編碼器線纜是否匹(pǐ)配,或更換編碼器線纜; 2、確認是(shì)否使用光編(biān)20位或23位電機,光編電機需要設定P18組參(cān)數; 3、檢查驅動器版本號P21.38(為(wéi)2138及(jí)以上版本,僅限於X2E驅動器); 4、更換(huàn)驅動器或電機; |
|
Err.008: 對地短路檢測故障 |
1、UVW接線錯誤; 2、電機損壞; 3、驅(qū)動器故(gù)障 |
1、檢測線(xiàn)纜UVW是否與地短路,如果是則更換線纜; 2、檢查U-V、U-W、V-W之間電阻阻值是否平衡(héng),UVW對(duì)PE是否(fǒu)絕緣; |
|
Err.009: 過流故障A |
1、指(zhǐ)令輸入與接通伺服同步或指令輸入(rù)過快; 2、外接製動電阻過小或短路; 3、電機電纜接觸(chù)不良; 4、電機電纜接地; 5、電機UVW電纜短路; 6、電機燒壞; 7、軟(ruǎn)件檢測出功率晶體(tǐ)管過電流 |
1、檢查指令(lìng)輸入時序,伺服接通“rdy”後輸入指(zhǐ)令 ; 2、測量製動電阻阻值是否滿足規格(gé),按說(shuō)明書要求重新(xīn)選擇合理(lǐ)製動電(diàn)阻(zǔ); 3、檢查線纜連接器是否鬆(sōng)脫,確保(bǎo)連接器緊固; 4、檢查電機UVW線與電機接地線(xiàn)之間的絕緣電阻絕緣(yuán)不良時更換電機; 5、檢查電(diàn)機電纜連接UVW是(shì)否短路,正確(què)連(lián)接電機電纜(lǎn); 6、檢(jiǎn)查電機各線纜間電(diàn)阻阻值是否相同(tóng),不同則更換電機; 7、減小負載。提升驅動器、電機容量,延長(zhǎng)加減速時間; 8、確認版本號參數P21.36、P21.37、P21.38、為(wéi)1107/1108/1207或以上,若不符請升級固件; |
|
Err.010: 過(guò)流故障B |
1、指(zhǐ)令輸入與接通伺服(fú)同步或指令輸入過快 ; 2、外接製動電阻過小或短路; 3、電機電纜接觸不良(liáng) ; 4、電機電纜接地 ; 5、電機UVW電纜短路; 6、電機燒壞; 7、軟件檢測出功率晶體管過電流; |
1、檢查指令輸入時序,伺服接通“rdy”後輸入指(zhǐ)令; 2、測量製動電阻阻值(zhí)是否(fǒu)滿足規格,按說明書要求重新選(xuǎn)擇合理製動電阻; 3、檢查線纜連接器是否鬆脫,確保連接器緊固; 4、檢查電(diàn)機UVW線與電機接地線(xiàn)之間的絕緣電(diàn)阻絕緣不良時更換電機; 5、檢查電機電纜連接UVW是否短路,正確連接電機電纜; 6、檢查電機各線纜間電阻阻值是否相同,不同則更換電機; 7、減小負載。提升驅動器、電(diàn)機容量,延長加減速時間(jiān); |
|
Err.012: 增量光電編碼(mǎ)器Z斷線或者編碼器圈數異常 |
增量式編碼器: 1、Z信號接(jiē)收異常,Z信號線接(jiē)線(xiàn)不(bú)良或(huò)編碼器故障導致Z信號丟失; 編(biān)碼器: 2、編碼器電池供電不足; 3、參(cān)數P06.47=1(設置為式係統)後,未進(jìn)行編碼器初始化操作;或在驅動器斷電期間,編碼器電機端接線有拔插; |
1、手動旋轉電機軸,如果依然報故障(zhàng),則檢查編碼器接線,重新接線或更換電纜,或更換(huàn)電機,重新上電; 2、需要確認電池電壓在3.3V或以上,若電池電壓不足,請更換電池; 3、將 P20.06 =7初始化(huà)圈數,重新上電; |
|
Err.013: 編碼器通信異常 |
1、通信式編碼器斷線、折彎次數較多的場(chǎng)合未使用高柔線纜(lǎn)導(dǎo)致線路折斷; 2、編碼器未接地或被幹擾; 3、通信校驗異常; |
1、檢查編(biān)碼器接線是(shì)否存在接觸不良、折(shé)彎(wān)次數較多的場合需使用高柔線纜,或者更(gèng)換編(biān)碼器線纜; 2、檢查編碼器是否接地良好,或設置P06.40(60或以上); 3、對調、更換驅動器或電機測試; |
|
Err.014: 編碼器數據異常(cháng) |
1、串(chuàn)行編碼器斷線或接觸不良; 2、串行編碼器存儲(chǔ)數據讀寫異常 |
檢查接線,或(huò)者更換編碼器線(xiàn)纜(lǎn)(可參照Err.13的處理(lǐ)措施) |
|
Err.015: 編碼器(qì)電池電壓過低異常 |
編碼器電池電壓低於P06.48設定的閥值,並且P06.47的十位(wèi)設置為1 |
1、檢查電池的正負接線,電池0V與編碼器GND共針腳,不(bú)能接3、4號針腳或外(wài)殼。檢查電池的線是否外露; 2、更換編碼器電池 |
|
Err.016: 速度偏差過大 |
速度指令和實際測得的速度的差(chà)值超(chāo)過P06.45設定的閥值 |
1、將P06.45的設定值提高(gāo); 2、將內部位(wèi)置指令的加減(jiǎn)速時間延長,或者調節(jiē)增(zēng)益提高係(xì)統的響應; 3、將速度偏差過大閾值功能置為無效,即P06.45=0 |
|
Err.017: 轉矩(jǔ)飽(bǎo)和(hé)超(chāo)時(shí) |
轉矩長(zhǎng)時間處於飽和狀態,持續(xù)時間超過P06.46設定的閥(fá)值 |
1、提高參數P06.46設定時長; 2、檢查UVW是否斷線 |
|
Err.018: 控製電欠壓(yā)
|
1、控製電(diàn)輸入接地不(bú)良,或輸入電源故障(zhàng); 2、電壓欠壓或(huò)在使用過程中,輸入電源存在瞬間斷電(diàn)的情況; |
1、檢查輸入電源電壓及接(jiē)線; 2、確(què)保伺服控製電(diàn)源(yuán)及主電源獨立供電,避免(miǎn)其他操作切斷電源; 3、在麵板上將P07.22設置為HX1000; |
|
Err.019: 飛車故障 |
由於接線等(děng)錯誤,導致控製回路散,導致電機(jī)飛車失速;
|
1.檢查電機(jī)UVW相間阻(zǔ)值是否均衡及(jí)編碼器接線; 2.檢查驅動器、電機,如有必要(yào)請更換驅動器或電機並聯係廠家 |
|
Err.020: 過(guò)電壓 |
1、電源電壓超過允許範圍(大於AC260V); 2、製動(dòng)電阻斷線,製動電阻不匹配,導致無法吸收再生能量; 3、負載慣量超出允(yǔn)許範圍; 4、驅動器損壞 |
1、測量(liàng)電源電壓,必要時安裝電(diàn)壓穩壓(yā)器(qì); 2、檢查(chá)是否已連接外置再生電阻。檢查外置再生電阻是否存在斷線或損壞(huài),確保(bǎo)接線正確,如果是電阻已燒毀,則建議更換功率更大的外置電阻(電機功率750W或以下,再生電阻規格=50Ω、≥100W。電機功率750W以上,再生(shēng)電阻規格為=30Ω、≥100W); 3、延長加減速時間,或(huò)者根據(jù)負載慣(guàn)量重新選擇合適的驅動器和電機 |
|
Err.021: 欠電壓 |
1、電源電壓下降; 2、發生瞬時停電; 3、欠壓保護閾值(P06.36)設置偏高; 4、驅動(dòng)器(qì)損壞 (注:這個故障默認不存儲記(jì)錄,可(kě)通過(guò)P07.19設定是否存儲 ) |
1、測量電源電壓,必要時安裝電壓穩壓器; 2、確認電源電壓正常的情況下,確認(rèn)欠壓保護閾值設(shè)定值(P06.36),可適當降低保護閾值設定值;默(mò)認值是100%(對應輸入電壓220V),設為50%。 |
|
Err.022: 電流采樣故障 |
驅動器內部電流采樣故障 |
1、檢查動力(lì)線UVW是(shì)否存在相序錯誤或短(duǎn)路; 2、檢查U-V、U-W、V-W之間電阻阻值是否平衡,UVW對PE是(shì)否絕緣(yuán); |
|
Err.023:AI采樣電(diàn)壓過大
|
1、AI接線錯誤; 2、外部輸入電壓偏高 |
正確連接AI輸入,將輸入電壓(yā)設定在±10V以內 |
|
Err.024: 過速 |
1、速度指令超過了轉速設(shè)定值; 2、UVW相序錯誤(wù); 3、速度響應嚴重超調(diào); 4、驅動器故障 |
1、降低(dī)速度指令,在(zài)電機轉速以內; 2、檢查UVW相序是否正確; 3、調整速度環增益,減少超調; |
|
Err.025: 電角度辨識失敗 |
1、負載或慣量太大; 2、編碼器(qì)接線有誤 |
1、減小負載或加大電流環增益; 2、檢查編(biān)碼器線或更換新編(biān)碼(mǎ)器線纜; |
|
Err.026: 慣量辨識失敗故障 |
1、負載或慣(guàn)量太大,電機(jī)不能按照規定的曲(qǔ)線運行; 2、辨識過(guò)程中出現其他故障導(dǎo)致辨識終止 |
1、減小負載或加大電(diàn)流環增益(yì); 2、保證辨識過程正常; |
|
Err.027: DI端子(zǐ)參數設置故障 |
1、不(bú)同的物理DI端子重複分配了同一DI功能; 2、物理DI端子與通信控製的DI功能同時存在(zài)分配 |
1、P04.01~P04.09中有同一功能配置到多個物理DI端子的的情況; 2、P04.01~P04.09中分配的功能,與P09.05~P09.08中(zhōng)相應的二進製位同時啟(qǐ)用(yòng),請參考P09.05~P09.08的使用方法;重新分配(pèi)DI功能 |
|
Err.028: DO端子參數設置故障 |
不同的DO重複分配了同(tóng)一輸出 |
P04.21~P04.29中有同一功能配(pèi)置到多個DO的的情況,重新分配DO功(gōng)能; |
|
Err.040: 伺服ON指令無(wú)效故障 |
執行了讓電機通(tōng)電(diàn)的輔(fǔ)助功能後,仍然從上位機輸入了伺服ON命令 |
改變不當的操作(zuò)方式,如在手動JOG模式或手(shǒu)動識別(bié)慣量時,伺服使能已經ON;(注:手動JOG和手動識(shí)別慣(guàn)量,伺服使能不能ON狀態) |
|
Err.042: 分頻脈衝輸出過速 |
超過了硬件允許的脈衝輸出上限 |
更改分頻輸出設置功能碼,使得在(zài)伺服工作的整個速度範圍內,分頻輸出脈衝頻(pín)率不會超限 |
|
Err.043: 位置偏差(chà)過大故障 |
1、伺服電機的UVW接線; 2、伺服(fú)驅動器增益較低; 3、位置指令脈衝的頻率較高或(huò)超(chāo)速; 4、位置指令加速過大; 5、位置偏差超出位置偏差過(guò)大故障值(P00.19)設置的值過小(xiǎo); 6、伺服驅動器/電(diàn)機故障; |
1、重點確切檢查是否存在機械堵轉、撞擊; 2、確認電機動力線UVW電纜的接線,確認(rèn)接線無誤; 3、確認伺服驅動(dòng)器增益是否過(guò)低,提高增益; 4、嚐試降低指令頻率後再運行 降低位(wèi)置指令頻率、指令加速度或調(diào)整電子齒輪比; 5、降低指令加(jiā)速度後再運行 加入(rù)位置指令加減速時間參數等平滑功能; 6、確認位置偏(piān)差故障值(P00.19)是否合適,增大(dà)設定(P00.19)值; 7、後台查驗運行圖形,若有輸入沒反(fǎn)饋請更換伺服驅動器; |
|
Err.044: 主回路輸入缺相 |
1、三相輸入線纜接觸(chù)不良; 2、缺相故障,即在主(zhǔ)電源ON狀態(tài)下,R\S\T相的(de)某一相電壓過低的狀態持續(xù)了1秒以上; 3、1KW或以上驅動器,使用單相220V電源或(huò)使用電子變壓器三相220V; |
1、檢查三相(xiàng)電源輸入的線纜是否連接穩固(注意安全,不要帶電操作); 2、測量三相電源各相的電壓,確保輸(shū)入電源三相(xiàng)平(píng)衡或者確保輸入電源電壓符合規格 3、1KW或以上電機,使用(yòng)單相220V電源時,設置參數P06.30=1,關閉缺相報警; 4、使用電子變壓器時,在驅動器麵板上設置參數P07.22=1001; |
|
Err.045: 驅動器輸出缺相 |
1、電機UVW接線(xiàn)不良; 2、電機損壞,出現(xiàn)斷路; 3、驅動器輸出模塊損壞; |
1、檢查UVW接線; 2、檢查U-V、U-W、V-W之間電阻阻(zǔ)值是否平衡(héng),UVW對PE是否絕緣;; |
|
Err.046: 驅動器過載 |
帶載(zǎi)運行超過驅動器反時限曲線,原(yuán)因如下: 1、電(diàn)機UVW線或編碼器線(xiàn)不良(liáng)或者連接鬆動; 2、電(diàn)機堵轉或者被外力驅(qū)動,如機械卡死、碰撞(zhuàng),重力或別的外力拖動,或者機械製動器(抱閘)沒有打開(kāi)就運行; 3、多台驅動器配線時,誤將別(bié)的同一台電機UVW線和(hé)編碼器線連接到不同的驅動器上; 4、負(fù)載過大,驅動器(qì)或電(diàn)機選型偏小(xiǎo); 5、可能(néng)缺相或相(xiàng)序接錯; 6、驅動器或電機損壞 |
注:重點檢查電機是否卡住、堵轉(zhuǎn),可手動轉(zhuǎn)動電機軸確認; 1、確認電機UVW線和編碼器接線是否存在問題; 2、確認電機沒有(yǒu)堵轉或被外力驅動,確認(rèn)機械(xiè)製動器(抱(bào)閘(zhá))已經打開; 3、確認多台驅動器和電機沒有(yǒu)出現交叉(chā)配線(xiàn),即沒有出現一台電機UVW線和編碼器線連接到不同的驅動器上; 4、延長加減速時間,重新選擇合適的驅動器(qì)或電機; 5、檢(jiǎn)查電機輸出的UVW是否接錯,是否對地短路; 6、檢查是否由於幹擾(rǎo)脈衝導致(zhì)定位偏位引起的撞擊,確認後參照幹擾處理辦法; |
|
Err.047: 電機(jī)過(guò)載(zǎi) |
帶載運行超過驅動器反時限(xiàn)曲線,原因(yīn)如下(xià): 1、電機UVW線或編碼器線不(bú)良或者連接鬆動; 2、電機堵(dǔ)轉或者被外力驅動,如機械卡死、碰撞,重(chóng)力或別的外力拖動,或者機(jī)械製(zhì)動器(抱閘)沒有打開就運(yùn)行; 3、多台驅動器配線時,誤將別的同一台電機UVW線(xiàn)和編碼器線連接到不同的驅動器上; 4、負載(zǎi)過大,驅動器或電機選型偏小; 5、可能(néng)缺相或相序接錯; 6、驅動器或電機損壞 |
注:重點檢查電機是否卡住、堵轉,可手動轉(zhuǎn)動電機軸確認; 1、確認電機UVW線(xiàn)和編碼器接線是否存在問題; 2、確認電機沒有堵(dǔ)轉或被外力驅動,確認機(jī)械製動器(抱閘(zhá))已經(jīng)打(dǎ)開; 3、確認多(duō)台驅動器和電機(jī)沒有出現交叉配線(xiàn),即沒有出(chū)現一台電機(jī)UVW線和(hé)編(biān)碼器線連接(jiē)到不同(tóng)的驅動器上; 4、延長加減速時間,重新選(xuǎn)擇合適的驅動器或電機; 5、檢查電機(jī)輸(shū)出的UVW是否(fǒu)接錯,是否對(duì)地短路; 6、設置參數P06.35=120,設置後仍然(rán)報警請更換更(gèng)大功率電機; |
|
Err.048: 電子齒輪設定錯誤 |
電子齒輪比超過規格範圍 |
在驅動器麵板上設置時注意區分高低位(左起為H則為高位,為L則為低位) |
|
Err.049: 散熱器過(guò)熱 |
1、風扇損壞; 2、環(huán)境溫度(dù)過高(gāo); 3、過載後通過關閉電源對過載(zǎi)故障複位,並(bìng)持續多次(cì); 4、伺服驅動(dòng)器的安(ān)裝方向、與其它伺服驅動器的間隔不合理(lǐ); 5、伺服驅動器故障; 6、驅(qū)動器或電機損壞 |
1、運行時風扇是否運轉,更換風扇(shàn)或驅動(dòng)器(qì); 2、測量環境溫(wēn)度 改善伺服(fú)驅動器的冷卻條件,降低環境溫度; 3、查看故障記錄,是否有報過載故障,變更故障複位方法,過載後等待30s後再複位。驅動器、電機選用功率過小,提高驅(qū)動器、電機容量,加大(dà)加減速時間,降低負載; 4、確認伺服驅動器(qì)的設置狀態,根據伺服驅動器的安裝標準進行安(ān)裝; 5、斷電5分鍾後(hòu)重啟是(shì)否依然報故障,重啟後如果仍報故障請(qǐng)更換伺服驅動器 |
|
Err.050: 脈衝輸入異常 |
1、輸入頻率大於脈衝輸入頻率設定值; 2、輸入(rù)脈衝受(shòu)到(dào)幹(gàn)擾 |
1、更改允許頻率,參數P06.38; 2、後台軟件查看指令是否(fǒu)異(yì)常,檢查(chá)線路接地(dì)情況,確保線路可靠接地,信號采用雙(shuāng)絞屏蔽線,輸入線和動(dòng)力線分開布線 |
|
Err.051: 全閉環位置偏(piān)差過大 |
1、外部編碼器異常(cháng); 2、相關(guān)設(shè)置過於保守 |
1、確認外部編(biān)碼器線連接是否正(zhèng)確,更換外部編碼(mǎ)器; 2、全(quán)閉環偏差過大,保護功能設置有誤確認(rèn)相關參數的設置 重新設置相關參(cān)數 |
|
Err.054: 用戶強製故障 |
通過(guò)DI功(gōng)能32(FORCE_ERR)強製進入故障狀態 |
正常的DI功能輸入,配置了DI功能32且輸入有效。斷開輸入即可解除故障 |
|
Err.055: 位置(zhì)複位故障 |
編碼器位置複位故障 |
聯係廠家獲取技術支持 |
|
Err.056: 主電源斷電 |
停電或主電源線路(lù)異常。(注:這(zhè)個故障默認不存儲記錄,可通過P07.19設定是(shì)否(fǒu)存儲 ) |
1、檢查輸入主電(diàn)源是否有瞬間掉電,提升電源(yuán)電壓容量; 2、確保伺服控製電源及(jí)主電源獨立供(gòng)電,避免其他操作切斷電源; |
|
Err.060: 寫(xiě)入定製版程序之後啟動 |
在已經有標準程序的驅動器(qì)下載入(rù)定製版(bǎn)程(chéng)序之後啟動 |
恢複出廠值,以便載(zǎi)入定(dìng)製參數 |
|
Err.065: CAN總線關閉 |
CAN總線(xiàn)斷開或者接收或發送異常 |
檢查接線,重新連接 |
|
Err.066: 異常的NMT命令 |
伺服ON時收到(dào)NMT停止命令或複位命令 |
NMT節點複位,不要在伺服ON時停止或複位CAN節點 |
|
Err.067: CAN總線故障 |
CAN總線斷開或者接收或發送異常 |
檢查接線,重新連接 |
|
Err.068: 外(wài)部過速(保留) |
1. 速度指(zhǐ)令(lìng)超過了轉速設定值 2.UVW相序錯誤(wù) 3.速度響應嚴重超調 4.驅(qū)動器故障 |
1.降低速度指令 2.檢(jiǎn)查uvw相序是否正確 3.調整速度環增(zēng)益,減少超調(diào) |
|
Err.069: 混合偏差過大 |
1. 外部編碼器斷線 2. 外部編碼器損壞 3. 設備傳動故障 |
1. 檢查(chá)或更換(huàn)外部編碼器和接線 2. 檢查(chá)機構傳動部分,並維修好機械部分 |
|
Err.071: 節點保護或者心跳超時(shí) |
節點保護和(hé)心跳監控(kòng)到達設定時間沒有收到相應的應答 |
檢查節點是否在線,NMT節點複位 |
|
Err.072: 同(tóng)步失效 |
CANOPen IP模式(shì)下(xià)與上位(wèi)機同步失效(xiào) |
NMT節點複位,或者6040發送故障(zhàng)複位(wèi)命令 |
|
Err.073: CANOPen軌跡緩衝區下溢 |
上位機同步失(shī)效(xiào)導致 |
NMT 節點複位,或者(zhě) 6040 發送故障複位命令 |
|
Err.074: CANOPen軌跡緩衝區(qū)上溢(yì) |
可緩存8個位(wèi)置點的數據 |
NMT 節點(diǎn)複位,或者 6040 發送故障(zhàng)複位命令 |
|
AL.080: 欠電壓警告 |
母線電壓較低時輸出的警告狀態 |
1、檢查輸入主電源是否正常; 2、調低欠壓檢測點參數P06.36 3、參考報警Err.21處理方法; |
|
AL.081: 驅動器過(guò)載警告 |
帶載運行超過驅動器(qì)反時限曲線,原因如下: 1、電(diàn)機UVW線或編碼器線不良或者連接鬆動; 2、電機堵轉(zhuǎn)或者被外力驅動,如機械卡死、碰撞,重(chóng)力或別的外力拖動,或(huò)者機械製動器(抱閘)沒有打開就運(yùn)行; 3、多台驅(qū)動器配線時,誤將別的同一(yī)台電機(jī)UVW線和編碼器線連接到不同的驅動器上(shàng); 4、負載過大,驅動器或電機(jī)選型(xíng)偏小; 5、可能缺相或(huò)相(xiàng)序接錯; 6、驅動器或電機損壞 |
注:重點檢查電(diàn)機是否卡住(zhù)、堵轉,可(kě)手動轉動電機軸(zhóu)確認; 1、確認電機UVW線和編(biān)碼器接線是否(fǒu)存在問題; 2、確認電機沒有堵轉或被外力驅動,確認機械製動器(抱閘)已經打開; 3、確認多台驅動器和電機沒(méi)有出現交叉(chā)配線,即沒有出現一台電機UVW線和編碼器線(xiàn)連接到不同(tóng)的驅(qū)動器上; 4、延長加減速時間(jiān),重新選擇合適的驅動器或電機; 5、檢查電機輸(shū)出的UVW是否接錯,是否對地短(duǎn)路; |
|
AL.082: 電機(jī)過載警告 |
帶載運(yùn)行超過驅動器反時限曲線,原因如下: 1、電機(jī)UVW線或編碼器(qì)線不良或者連接鬆動; 2、電機堵轉或者被外力驅動,如機械卡死、碰撞,重力或別的外力拖動,或(huò)者機械製動器(抱閘)沒有打開就運行; 3、多台驅動器配線時,誤將別(bié)的同一台電機UVW線和編碼器線連接到(dào)不同(tóng)的驅動器上; 4、負載過大,驅動器或電機選(xuǎn)型偏小; 5、可能缺相或相序接錯; 6、驅動器或電機損壞 |
注:重點檢查電機是否卡住、堵轉,可手動轉動電機(jī)軸確認; 1、確認(rèn)電機UVW線和編碼器(qì)接(jiē)線是否存在問題; 2、確認電機沒有堵轉或(huò)被(bèi)外力驅動,確認機械製動器(抱閘)已(yǐ)經打開; 3、確認多台驅動器和電機沒有出現(xiàn)交叉配線,即沒(méi)有出現一台電機UVW線和編碼器線連接到不同的驅(qū)動器上; 4、延長加減速時間,重新選(xuǎn)擇合適的驅動器或電機(jī); 5、檢查電(diàn)機輸出的UVW是(shì)否接錯,是否對地短路; |
|
AL.083: 需要重新接通(tōng)電源的(de)參數變更 |
變(biàn)更了需要重新接通電源(yuán)方可生效的參數 |
重新上電 |
|
AL.084: 伺服未準備(bèi)好(hǎo) |
伺服未準備好時伺服ON |
檢(jiǎn)測到伺服READY時 再給使能 |
|
AL.085: 寫E2PROM頻繁操作警告 |
程序非正常頻繁操作E2PROM |
減少EEPROM寫入操作頻率,可以改用不(bú)存儲EEPROM的通信寫指令 |
|
AL.086: 正向超程警告提示 |
1、Pot和Not同時有效(xiào),一般在工作台上不(bú)會(huì)同時出現(xiàn)的; 2、伺服軸在某方(fāng)向上出現超程狀態,可自動解除 |
正向限位開關被觸發,檢查運行模式,給負(fù)向指令或人工轉動(dòng)電機,離開正向限位,會自動清除警告 |
|
AL.087: 負向超程警告提示 |
1、Pot和Not同時有(yǒu)效,一般在工作台上不會同時出現的; 2、伺服軸在某方向上出現超程狀態,可(kě)自動解除(chú) |
負向限位開關被觸發 檢查運(yùn)行模式,給正向指(zhǐ)令或人工轉動電機,離(lí)開正向限位,會自動清(qīng)除警告(gào) |
|
AL.088: 位置指令過速 |
1、電子齒輪比設置過大(dà); 2、脈衝頻率過高(gāo) |
1、減少設(shè)定的電子齒輪比; 2、減少輸入(rù)脈衝頻率 |
|
AL.090: 編碼器角度初始化警告 |
編(biān)碼器(qì)角度重新初始化時偏離過大(大於7.2度電角度)警告 |
更換電機(jī) |
|
AL.093: 能(néng)耗製動過(guò)載 |
能耗製動功率過載 1、製動電阻接線(xiàn)錯誤或接觸不良(liáng); 2、使用內置電阻(zǔ)的情況有可能出現默認短接線脫落情(qíng)況; 3、製動(dòng)電阻容量不足; 4、製動電阻阻值過大導致長(zhǎng)時間製動; 5、輸(shū)入電壓超過規定; 6、製(zhì)動(dòng)電阻(zǔ)阻值、容量、或發熱時間常數設置錯誤(wù); 7、伺服驅動器故障 |
1、檢查製動(dòng)電阻接線(xiàn)是否正常; 2、檢查內置電阻接線是否正常; 3、增大製動(dòng)電阻容量; 4、減少(shǎo)製(zhì)動電阻阻值; 5、減少輸入的電壓值; 6、按規格設定合適的參數; 7、更換伺服驅動器 |
|
AL.094: 外接再生泄放電阻過小(xiǎo) |
1、外接再生泄放電(diàn)阻小於驅動器要(yào)求; 2、參數設置錯誤 |
1、按規格配置外(wài)接再(zài)生泄(xiè)放電阻的功率; 2、查看參數P00.21~P00.24參數是否正確 |
|
AL.095: 緊急停止 |
觸(chù)發了緊急(jí)停止 |
正(zhèng)常的DI功能輸入,配置(zhì)了DI功能30且輸入有效。斷開輸入即可解除警告 |
|
AL.096: 原點回(huí)歸(guī)錯誤 |
1、搜索原點的(de)時間超(chāo)過了(le)P08_95的設定值; 2、P08.90參數設置為3、4或 5,且碰到限位; 3、不(bú)以限位為原點時(shí),兩次碰到限位; 4、正負超(chāo)程限位同時觸發; 5、使用碰撞回原(yuán)點時,參數(shù)P03.29、P03.30設置不合理; |
1、 加大P08.95設定值; 2、回原點搜(sōu)索速度過快(kuài)導致,減小回原點搜索的速度P08.92,P08.93; 3、確保正負超程限位開關不能同(tóng)時觸(chù)發(fā)或誤觸發; 4、使(shǐ)用碰撞回原點時,合理設置參數P03.29、P03.30即可;(在(zài)驅動器麵板上將P07.08設置為HX0100,使用調試軟(ruǎn)件時設置參數P07.08=256) |
|
AL.097: 編碼器電池欠壓(yā) |
編碼器電池電壓低於P06.48設定的閥值 |
檢查更換編碼器電池 |
處理幹擾排除方:
1. 監控伺服21.15參數是否每次都一(yī)樣;
2. 檢查客(kè)戶的機台是否有接地;
3.檢查伺服端50並針(zhēn)腳及到上位機的屏蔽線是否接好(兩頭(tóu)要接或單獨接驅動器一側或不接,多(duō)個驅動器時要采用第三類接地方法);
4.檢(jiǎn)查伺(sì)服50Pin針腳及到上位接線是否接(jiē)緊,或虛焊(hàn);
5.是否客戶24v開關電源受到幹擾,改成伺服(fú)本身(shēn)24v電源,檢查0V是否與PE相通;
6.調整伺服驅動器參數P06.41;
7.強弱電布線(xiàn)分離走線(即強弱電走不同線槽);
8.在伺服驅動器(qì)的動力線加磁環繞5圈,找到幹擾源,從幹擾源入手;
9.檢查上(shàng)位(wèi)機是(shì)否受(shòu)到幹擾。
附表一:電(diàn)機型號編號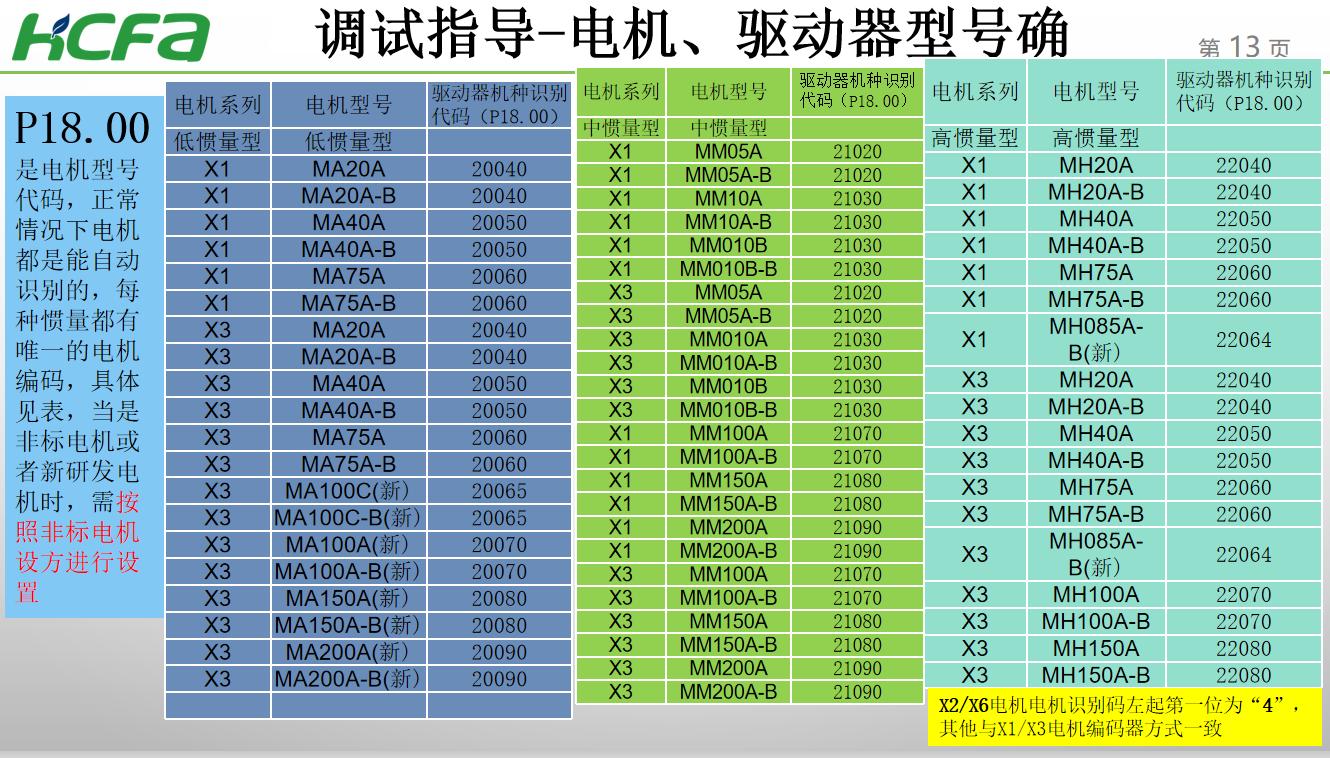
附表二:驅動器型號編號

- 上一篇: 新睿係統三五軸報(bào)警排除方法
- 下一篇: 暫時沒有數(shù)據
